Linear Algebra
学习的是MIT的Introduction to Linear Algebra(Gilbert Strang),其公开课的视频可以在网易公开课上找到。个人人为其是线性代数的最好(没有之一)的教程了
第一章(Introduction to Vectors)要点
- 矩阵与向量的相乘用矩阵列空间的线性组合来表示
第二章(Solving Linear Equations)要点
- 高斯消元
将矩阵转换成上三角矩阵U - 通过Gauss-Jordan消元求逆矩阵。
理论依据为 - A=LU分解。
任意一个矩阵都可以进行LU分解。其中L是主对角线上元素为1的下三角矩阵,U为上三角矩阵,其主对交线上的元素为pivot。有时候其分解需要进行行交换,则使用PA=LU形式。Matlab中使用[L,U]=lu(A)或[L,U,P]=lu(A)。
第三章(Vector Spaces and Subspaces)要点
- 零空间
即的所有解 - 矩阵的秩 行秩==列秩
- 的所有解 解为其特解与零空间的组合
- 空间的基与维数
- 四个空间:列空间、零空间、行空间、左零空间
其中行空间和零空间互为正交补,列空间和左零空间互为正交补
第四章(Orthogonality)要点
- 投影
- 投影矩阵的推导
假设求在A列空间S上的投影,如下图:
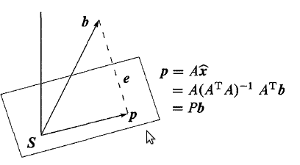
因为是垂直与其列空间S,则
当A的列向量为正交基时,可以理解为在A列空间中的坐标 - 主要应用是来解决没有解,只能求其最优解。即两边乘以的转置变成 ,其实 就是在
A列空间中的投影。 可逆时,不可逆时通过消元来求解。 - 可逆的充要条件是
A的列线性无关 - 最小二乘直线拟合(求其倒数,使其导数为0,得到一些列等式构造出)、基于squared error的线性回归也可以使用投影的理论来求解(也叫 normal equation )等等
- 投影矩阵的推导
假设求在A列空间S上的投影,如下图:
- 使用Gram-Schmidt方法在独立的向量上求其正交基的步骤
注意Gram-Schmidt的条件是其向量必须线性独立 - A=QR分解
当A的列向量线性独立的时候,其可以进行QR分解,Q为其正交基向量,R为上三角矩阵
第五章(Determinats)要点
- 10个属性
- det(I) = 1
- 行交换或列交换会导致行列式值的
符号的改变
- 如果矩阵A中有相同的行或相同的列,其det(A)=0
- 行或列的线性变换不改变行列式的值,如
- 矩阵中有0行或0列,则其det=0
- 三角矩阵的det等于其主对角线上元素的乘积
- ,其中U为A进行LU分解后的U矩阵
- det(AB) = det(A)det(B)
- det(A) =
- pivot可以通过行列式得到
- 通过余子式(cofactor)。得到行列式的计算公式
- Cramer法则求解Ax=b
第六章(Eigenvalues and Eigenvectors)要点
- 特征值于特征向量的求解公式
A - 的特征向量于A的相同,但是其特征值是A的n次方
- 的特征值等于A的特征值加a
注意A+B的特征值不等于其各自的特征值的和 - 特征值的和等于主对角线上元素的和,特征值的积等于其行列式
- 特征值与特征向量可以是虚数
如矩阵[0,-1; 1, 0] - 三角矩阵的特征值就其对角线上的元素
- nxn的对称矩阵的特征值可以重复,但是其肯定有n个正交基
- 正定矩阵
- 当A的所有特征值大于0时其为正定矩阵
当R的列向量线性独立时,是正定矩阵
- SVD分解
matlab中svd函数求的也是上面的U,,V。当A是对称矩阵时,其,因此U,V相同且其也是A的特征向量。因此在PCA中求协方差矩阵A的特征值与特征向量时用的也是svd(A'A),其正好就是其特征值(这里假设了A列向量线性独立,即A'A是正定矩阵)
第七章(Linear Transformations)要点
- 左右逆、伪逆